




Penentu Kedudukan Servo Dwi Paksi Jenis C/L/U
Parameter Teknikal
| Kedudukan servo paksi dua jenis C | Kedudukan servo paksi dwi jenis L | Kedudukan servo paksi dua jenis U | |||||||||||
| Nombor siri | PROJEK | Parameter | Parameter | Parameter | CATATAN | Parameter | Parameter | Parameter | CATATAN | Parameter | Parameter | Parameter | CATATAN |
| 1 | Muatan berkadar | 200kg |
500kg | 1000kg | Dalam radius R400mm/R400mm /R600mm paksi kedua | 500kg | 1000kg | 2000kg | Dalam radius R400mm/R600mm /R800mm paksi kedua | 1000kg | 3000KG | 5000KG | Dalam radius R600mm/R1500mm /R2000mm paksi kedua |
| 2 | Jejari piawai kilasan | R400mm | R400mm | R600mm |
| R400mm | R600mm | R800mm |
| R600mm | R1500mm | R2000mm |
|
| 3 | Sudut selak paksi pertama | ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
| ±180° | ±180° | ±180° |
|
| 4 | Sudut putaran paksi kedua | ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
| ±360° | ±360° | ±360° |
|
| 5 | Kelajuan putaran atas paksi pertama dinilai | 50°/S | 50°/S | 15°/S |
| 50°/S | 50°/S | 17°/S |
| 17°/S | 17°/S | 17°/S |
|
| 6 | Nilai kelajuan putaran paksi kedua | 70°/S | 70°/S | 70°/S |
| 70°/S | 70°/S | 17°/S |
| 24°/S | 17°/S | 24°/S |
|
| 7 | Ulang ketepatan kedudukan | ±0.10mm | ±0.15mm | ±0.20mm |
| ±0.10mm | ±0.10mm | 17°/S |
| ±0.15mm | ±0.20mm | ±0.25mm |
|
| 8 | Dimensi sempadan bingkai anjakan (panjang×lebar×tinggi) | 1200mm × 600mm × 70mm | 1600mm × 800mm × 90mm | 2000mm×1200mm ×90mm |
| - | - | - |
| - | - | - |
|
| 9 | Dimensi keseluruhan pengalih kedudukan (panjang×lebar×tinggi) | 2000mm×1100mm ×1700mm | 2300mm×1200mm ×1900mm | 2700mm × 1500mm × 2200mm |
| 1500mm×500mm ×850mm | 2000mm×750mm ×1200mm | 2400mm×900mm ×1600mm |
| 4200mm×700mm ×1800mm | 5500mm×900mm ×2200mm | 6500mm×1200mm ×2600mm |
|
| 10 | Plat putar dua paksi standard | - | - | - | - | Φ800mm | Φ1200mm | Φ1500mm |
| Φ1500mm | Φ1800mm | Φ2000mm |
|
| 11 | Ketinggian tengah putaran paksi pertama
| 1200mm | 1350mm | 1600mm |
| 550mm | 800mm | 1000mm |
| 1500mm | 1750mm | 2200mm |
|
| 12 | Keadaan bekalan kuasa | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Dengan pengubah pengasingan | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Dengan pengubah pengasingan | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Tiga fasa 200V±10%50HZ | Dengan pengubah pengasingan |
| 13 | Kelas penebat | H | H | H |
| H | H | H |
| H | H | H |
|
| 14 | Berat bersih peralatan | Lebih kurang 800kg | Kira-kira 1300kg | Lebih kurang 2000kg |
| Lebih kurang 900kg | Kira-kira 1600kg | Kira-kira 2500kg |
| Kira-kira 2200kg | Lebih kurang 4000kg | Lebih kurang 6000kg | |
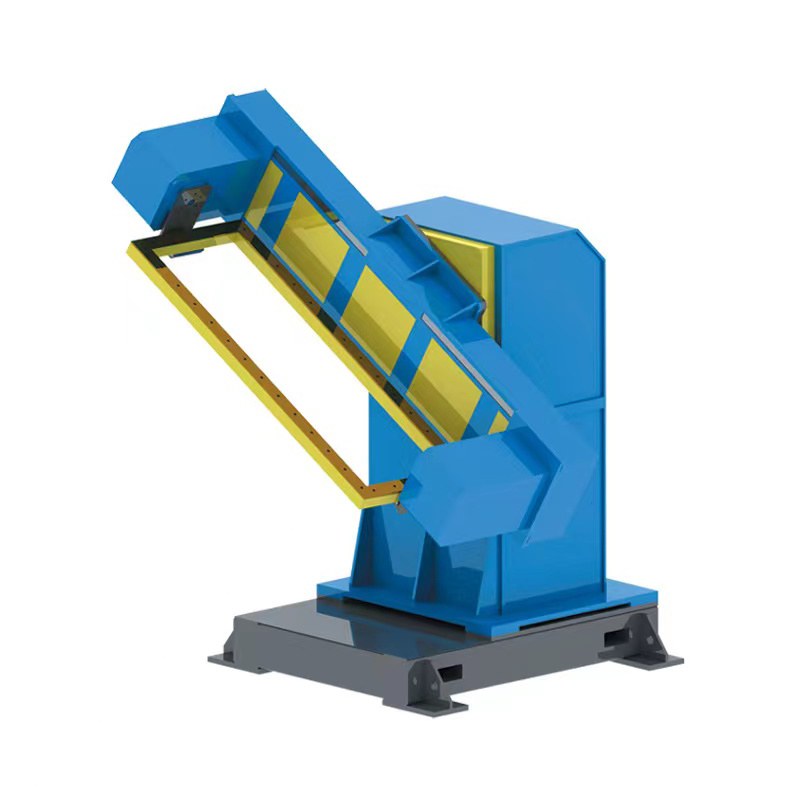
Kedudukan servo paksi dua jenis C
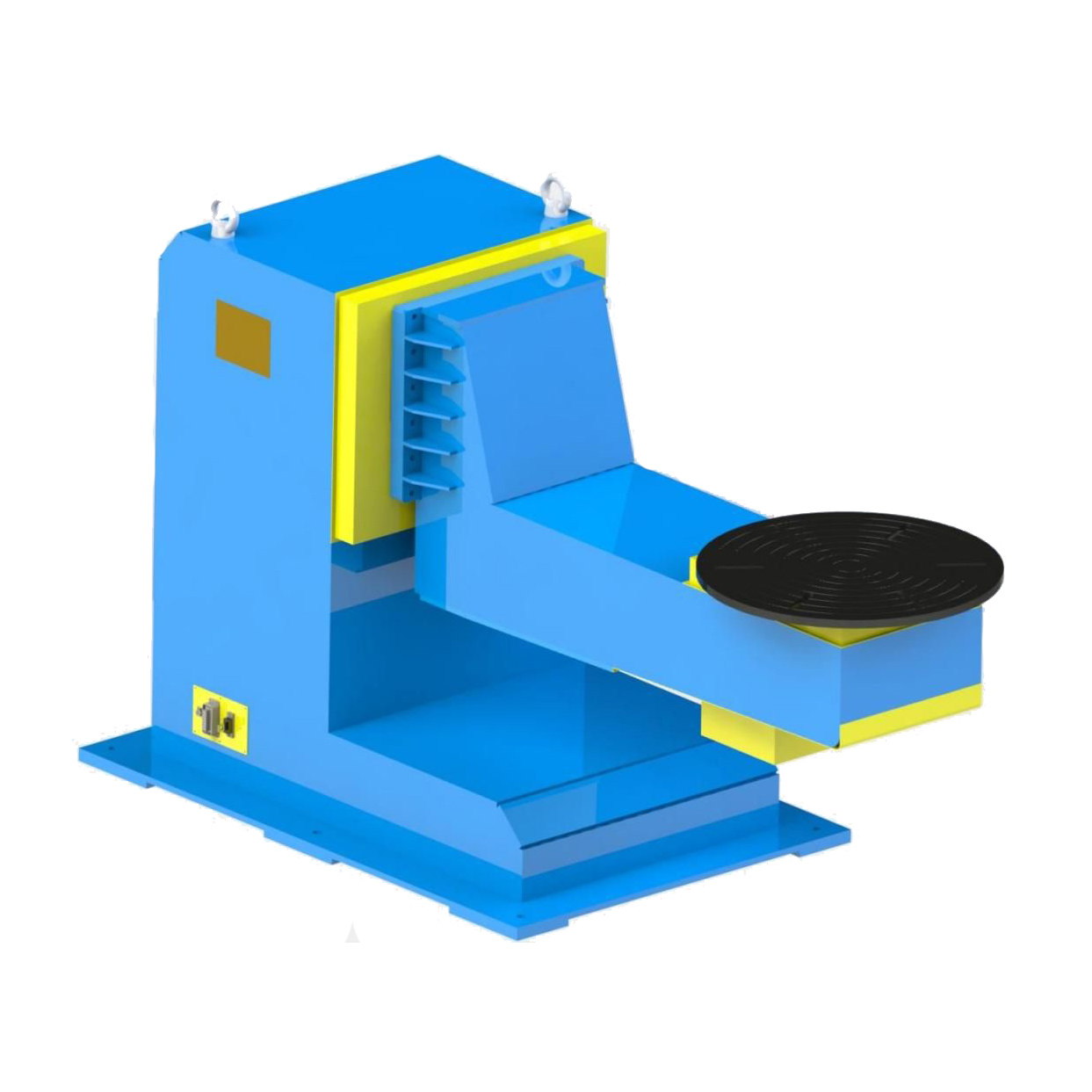
Kedudukan servo paksi dwi jenis L

Kedudukan servo paksi dua jenis U
Pengenalan Struktur
Kedudukan servo dwi paksi terutamanya terdiri daripada bingkai kamiran yang dikimpal, bingkai anjakan kimpalan, motor servo AC dan pengurang ketepatan RV, sokongan berputar, mekanisme konduktif, perisai pelindung dan sistem kawalan elektrik. Bingkai kamiran yang dikimpal dikimpal dengan profil berkualiti tinggi. Selepas penyepuhlindapan dan pelepasan tekanan, ia hendaklah diproses oleh pemesinan profesional untuk memastikan ketepatan pemesinan yang tinggi dan ketepatan kedudukan utama. Permukaan disembur dengan cat penampilan anti-karat, yang cantik dan murah hati, dan warna boleh disesuaikan mengikut keperluan pelanggan.
Rangka anjakan yang dikimpal hendaklah dikimpal dan diacu dengan keluli profil berkualiti tinggi dan diproses oleh pemesinan profesional. Permukaan hendaklah dimesin dengan lubang skru standard untuk memasang perkakas penentududukan, dan rawatan mengecat dan menghitam dan pencegahan karat hendaklah dijalankan.
Platform berputar memilih keluli profil berkualiti tinggi selepas pemprosesan mekanikal profesional, dan permukaannya dimesin dengan lubang skru standard untuk memasang perkakas kedudukan, dan rawatan pencegahan menghitam dan karat hendaklah dijalankan.
Memilih motor servo AC dan pengurang RV sebagai mekanisme kuasa boleh memastikan kestabilan putaran, ketepatan kedudukan, ketahanan lama dan kadar kegagalan yang rendah. Mekanisme konduktif diperbuat daripada tembaga, yang mempunyai kesan konduktif yang baik. Pangkalan konduktif menggunakan penebat integral, yang boleh melindungi motor servo, robot dan sumber kuasa kimpalan dengan berkesan.
Sistem kawalan elektrik menggunakan Japanese Omron PLC untuk mengawal positioner, dengan prestasi yang stabil dan kadar kegagalan yang rendah. Komponen elektrik dipilih daripada jenama terkenal di dalam dan luar negara untuk memastikan kualiti dan kestabilan penggunaan.











