




C/L/U Type Dual Axis Servo Positioner
Technical Parameters
|
C-type double-axis servo positioner |
L-type double-axis servo positioner |
U-type double-axis servo positioner |
|||||||||||
|
Serial number |
PROJECTS |
Parameter |
Parameter |
Parameter |
REMARKS |
Parameter |
Parameter |
Parameter |
REMARKS |
Parameter |
Parameter |
Parameter |
REMARKS |
|
1 |
Rated load |
200kg |
500kg |
1000kg |
Within R400mm/R400mm /R600mm radius of the second axis |
500kg |
1000kg |
2000kg |
Within R400mm/R600mm /R800mm radius of the second axis |
1000kg |
3000KG |
5000KG |
Within R600mm/R1500mm /R2000mm radius of the second axis |
|
2 |
Standard radius of gyration |
R400mm |
R400mm |
R600mm |
|
R400mm |
R600mm |
R800mm |
|
R600mm |
R1500mm |
R2000mm |
|
|
3 |
First axis flip angle |
±180° |
±180° |
±180° |
|
±180° |
±180° |
±180° |
|
±180° |
±180° |
±180° |
|
|
4 |
Second axis rotation angle |
±360° |
±360° |
±360° |
|
±360° |
±360° |
±360° |
|
±360° |
±360° |
±360° |
|
|
5 |
Rated upturn speed of first axis |
50°/S |
50°/S |
15°/S |
|
50°/S |
50°/S |
17°/S |
|
17°/S |
17°/S |
17°/S |
|
|
6 |
Rated rotating speed of second axis |
70°/S |
70°/S |
70°/S |
|
70°/S |
70°/S |
17°/S |
|
24°/S |
17°/S |
24°/S |
|
|
7 |
Repeat positioning accuracy |
±0.10mm |
±0.15mm |
±0.20mm |
|
±0.10mm |
±0.10mm |
17°/S |
|
±0.15mm |
±0.20mm |
±0.25mm |
|
|
8 |
Boundary dimension of displacement frame (length×width×height) |
1200mm×600mm ×70mm |
1600mm×800mm ×90mm |
2000mm×1200mm ×90mm |
|
- |
- |
- |
|
- |
- |
- |
|
|
9 |
Overall dimension of position shifter (length×width×height) |
2000mm×1100mm ×1700mm |
2300mm×1200mm ×1900mm |
2700mm×1500mm ×2200mm |
|
1500mm×500mm ×850mm |
2000mm×750mm ×1200mm |
2400mm×900mm ×1600mm |
|
4200mm×700mm ×1800mm |
5500mm×900mm ×2200mm |
6500mm×1200mm ×2600mm |
|
|
10 |
Standard two-axis rotary plate |
- |
- |
- |
- |
Φ800mm |
Φ1200mm |
Φ1500mm |
|
Φ1500mm |
Φ1800mm |
Φ2000mm |
|
|
11 |
Center height of the first axis rotation
|
1200mm |
1350mm |
1600mm |
|
550mm |
800mm |
1000mm |
|
1500mm |
1750mm |
2200mm |
|
|
12 |
Power supply conditions |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
With isolation transformer |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
With isolation transformer |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
Three-phase 200V±10%50HZ |
With isolation transformer |
|
13 |
Insulation class |
H |
H |
H |
|
H |
H |
H |
|
H |
H |
H |
|
|
14 |
Net weight of equipment |
About 800kg |
About 1300kg |
About 2000kg |
|
About 900kg |
About 1600kg |
About 2500kg |
|
About 2200kg |
About 4000kg |
About 6000kg |
|
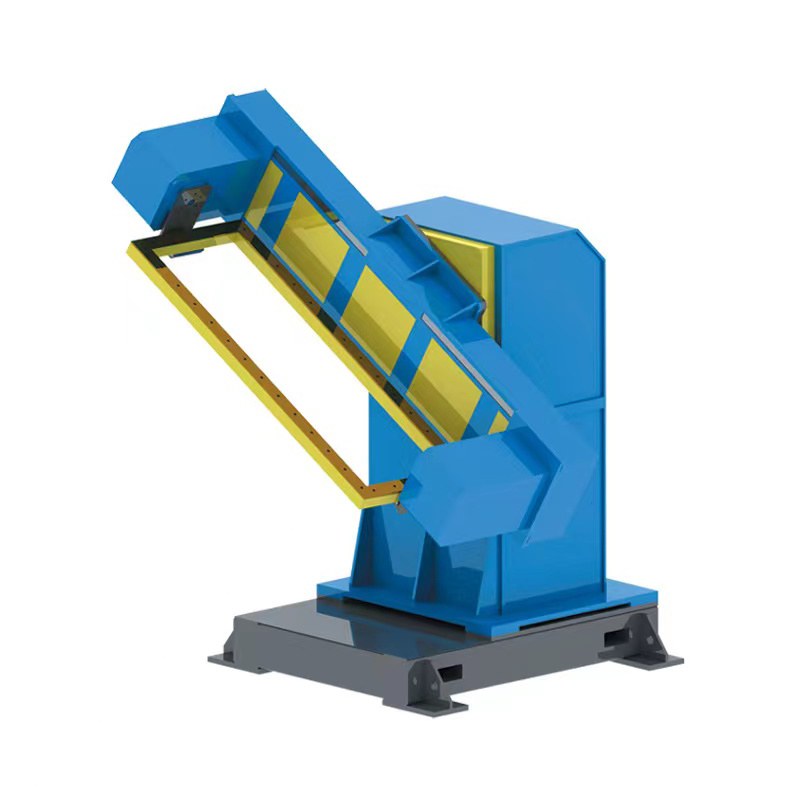
C-type double-axis servo positioner
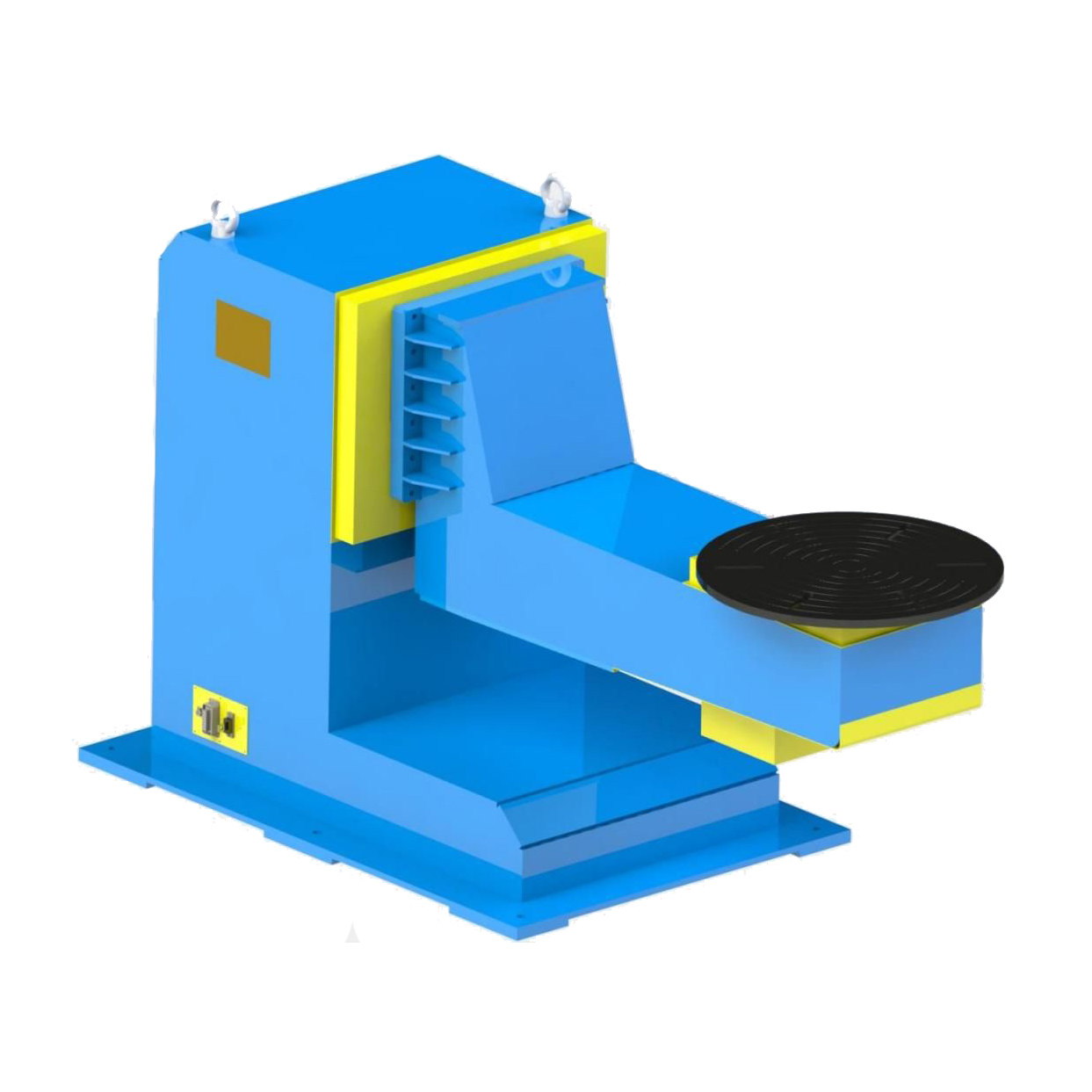
L-type double-axis servo positioner

U-type double-axis servo positioner
Structure Introduction
The dual axis servo positioner is mainly composed of welded integral frame, welding displacement frame, AC servo motor and RV precision reducer, rotary support, conductive mechanism, protective shield and electrical control system. The welded integral frame is welded with high-quality profiles. After annealing and stress relieving, it shall be processed by professional machining to ensure high machining accuracy and accuracy of key positions. The surface is sprayed with anti-rust appearance paint, which is beautiful and generous, and the color can be customized according to customer requirements.
The welded displacement frame shall be welded and molded with high-quality profile steel and processed by professional machining. The surface shall be machined with standard screw holes for mounting positioning tooling, and painting and blackening and rust prevention treatment shall be carried out.
The rotary platform selects high-quality profile steel after professional mechanical processing, and the surface is machined with standard screw holes for mounting positioning tooling, and blackening and rust prevention treatment shall be carried out.
Selecting AC servo motor and RV reducer as power mechanism can ensure the stability of rotation, accuracy of positioning, long durability and low failure rate. The conductive mechanism is made of brass, which has a good conductive effect. The conductive base adopts integral insulation, which can effectively protect servo motor, robot and welding power source.
The electric control system adopts Japanese Omron PLC to control the positioner, with stable performance and low failure rate. The electrical components are selected from famous brands at home and abroad to ensure the quality and stability of use.











