



Mengecop/ Menyusun Robot SDCX RMD-300/200/160/120/35/08/110/20/50
Parameter Teknikal
| Model No. | Darjah Kebebasan | Mod pemanduan | Muatan (KG) | Ketepatan kedudukan berulang (mm) | Julat pergerakan (°) | Kelajuan maksimum (°/s) | Inersia beban yang dibenarkan pergelangan tangan (kg·m2) | Pukulan bulat (kitaran/jam) | Jejari gerakan (mm) | Berat Tempatan (kg) | ||||||
| J1 | J2 | J3 | J4 | J1 | J2 | J3 | J4 | |||||||||
| SDCX-RMD300 | 4 | Pemacu servo AC | 300 | ±0.5 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 85 | 90 | 100 | 190 | 134 | 1000③ | 3150 | 1500 |
| SDCX-RMD200 | 4 | Pemacu servo AC | 200 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 105 | 107 | 114 | 242 | 78 | 1300③ | 3150 | 1500 |
| SDCX-RMD160 | 4 | Pemacu servo AC | 160 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 123 | 123 | 128 | 300 | 78 | 1500③ | 3150 | 1500 |
| SDCX-RMD120 | 4 | Pemacu servo AC | 120 | ±0.3 | ±180 | ± +100~-44 | ± +121~-15 | ±360 | 128 | 126 | 135 | 300 | 78 | 1560③ | 3150 | 1500 |
| SDCX-RMD50 | 4 | Pemacu servo AC | 50 | ±0.2 | ±178 | ± +90~-40 | ± +65~-78 | ±360 | 171 | 171 | 171 | 222 | 4.5 | 1700② | 2040 | 660 |
| SDCX-RMD20 | 4 | Pemacu servo AC | 20 | ±0.08 | ±1170 | ± +115~-25 | ± +70~-90 | ±360 | 170 | 170 | 185 | 330 | 0.51 | 1780① | 1720 | 256 |
| SDCX-RMD08 | 4 | Pemacu servo AC | 8 | ±0.08 | ±170 | ± +90~-40 | ± +68~-90 | ±360 | 251 | 195 | 195 | 367.5 | 0.25 | 1800① | 1433 | 180 |
Catatan:
① Trek ujian adalah 150mm tinggi dan 1000mm lebar, dan masa kitaran sebenar dipengaruhi oleh keadaan kerja sebenar;
② Trek ujian adalah 200mm tinggi dan 1000mm lebar, dan masa kitaran sebenar dipengaruhi oleh keadaan kerja sebenar;
③ Trek ujian adalah 400mm tinggi dan 2000mm lebar, dan masa kitaran sebenar dipengaruhi oleh keadaan kerja sebenar;
Elakkan sentuhan dengan gas dan cecair yang mudah terbakar, meletup dan menghakis; Jangan disimbah air, minyak dan habuk; Jauhkan daripada sumber bunyi elektrik (plasma)
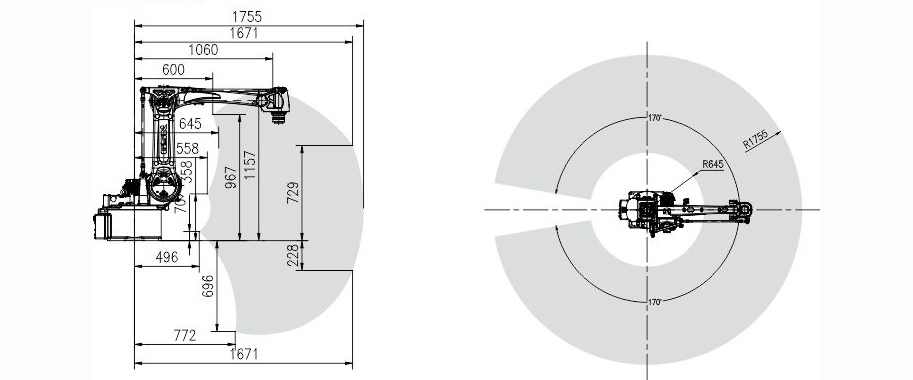
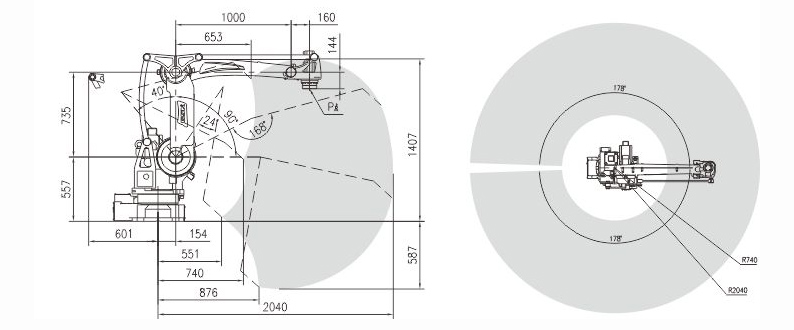
Julat pergerakan
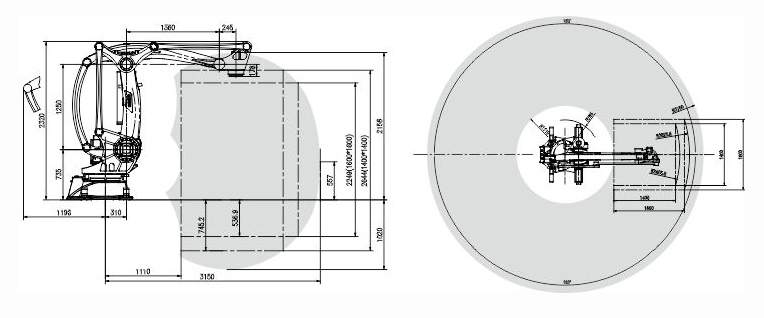
Plot Julat Pergerakan untuk SDCX-RMD300/200/160/120
Plot Julat Pergerakan untuk SDCX-RMD20
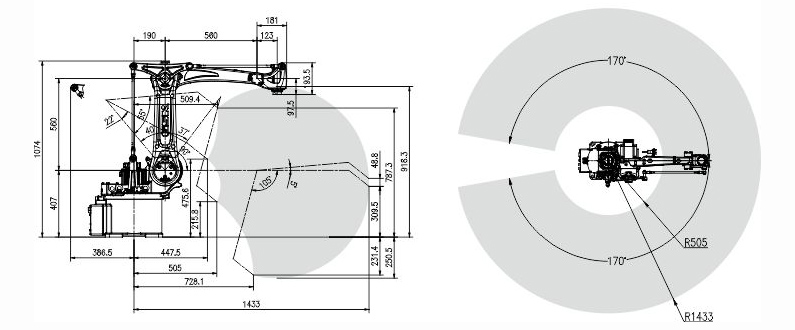
Plot Julat Pergerakan untuk SDCX-RMD08
Plot Julat Pergerakan untuk SDCX-RMD50
Paparan Aplikasi Produk
Penyelesaian
Skim teknikal projek pengendalian gegelung keluli












